








"One for four"
Up to 32 axes can be controlled simultaneously by one controller
It can realize collaborative operation between 4 robots

Safety monitoring dual double redundant backup
The safe operation of the robot is realized by 1+1 independent safety monitoring channels
The safety control system complies with the PLd class requirements of ISO 13849

A number of user interfaces
It can support serial communication,Ethernet communication、EtherCAT、 user IO
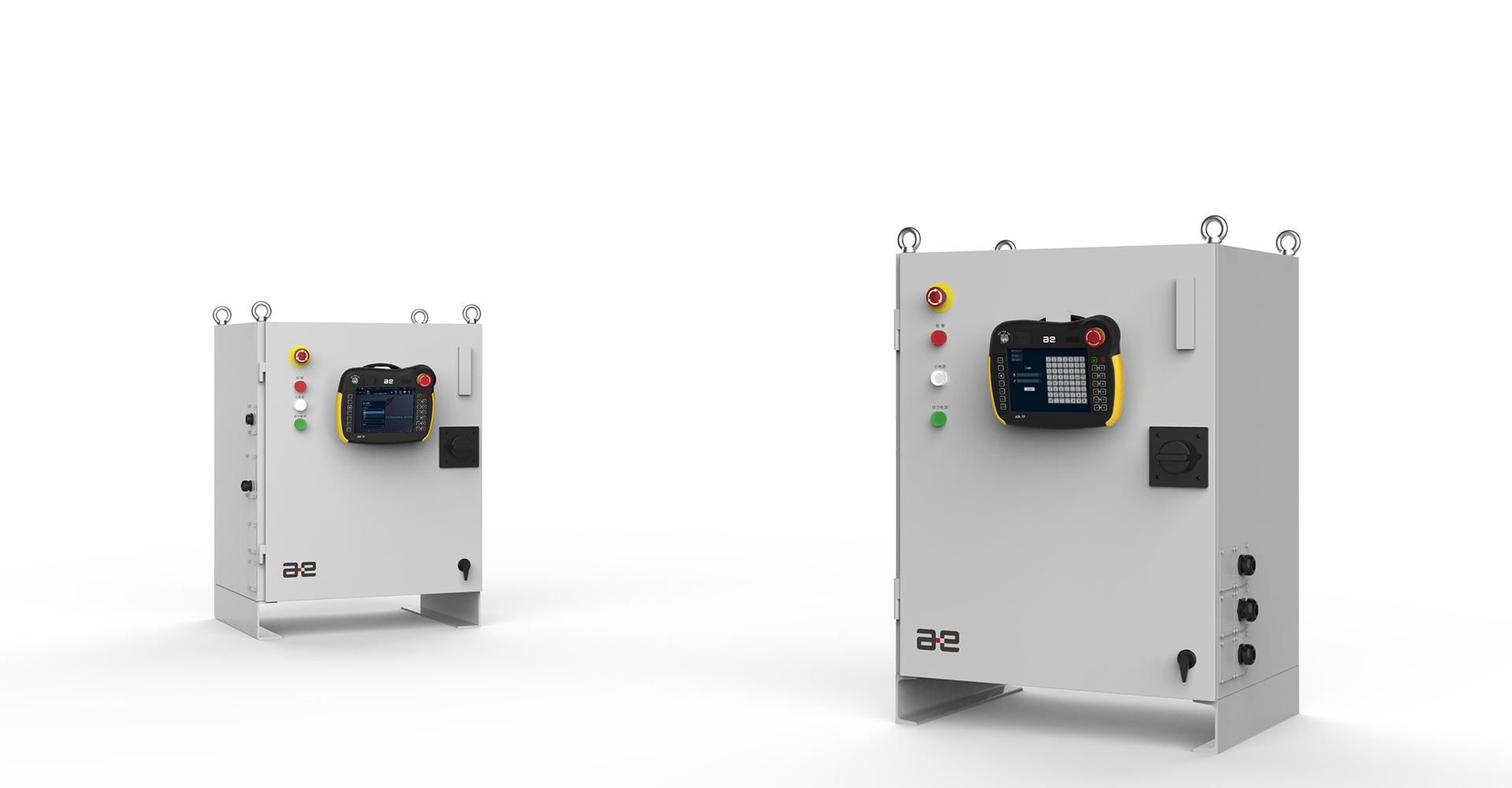
It is equipped with the self-developed robot control system - ARCS
It can meet the robot’s requirements for high speed,high precision motion control performance and high reliability
