


AE Robot Controller Software(ARCS)
是配天全系列机器人控制系统的核心控制软件
集成了总线协议转换,AR语言编译系统,机器人运动学、动力学算法,人机操作界面等组件模块
最大48轴的联动控制,涵盖多种补偿算法,绝对定位精度可达±0.1mm
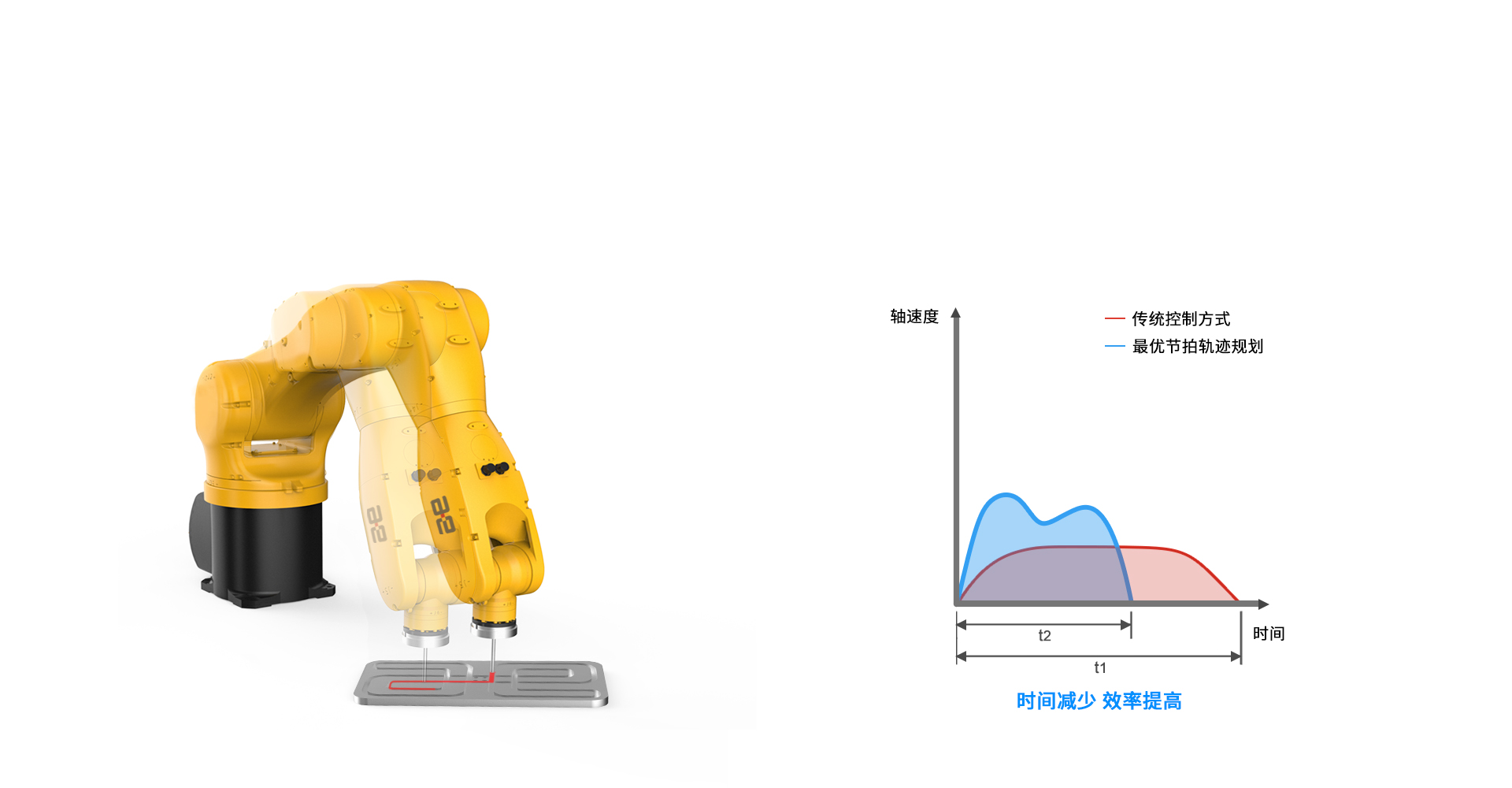
最优节拍轨迹规划
各轴在满足速度、加速度、加加速度和力矩等约束条件下
实现最短节拍
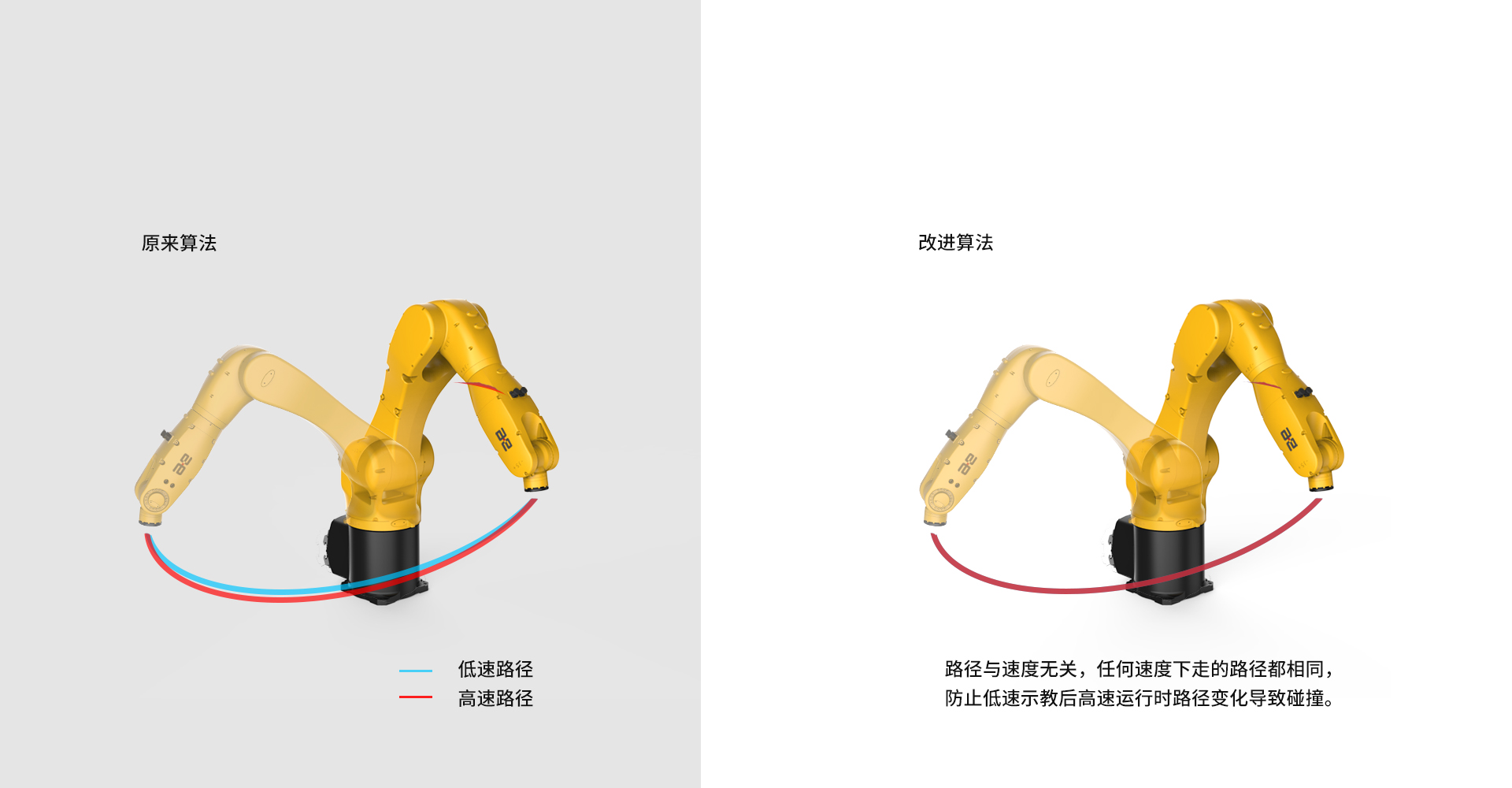
绝对路径保持
在低速高速运动时,始终保证实际轨迹与示教轨迹高度吻合
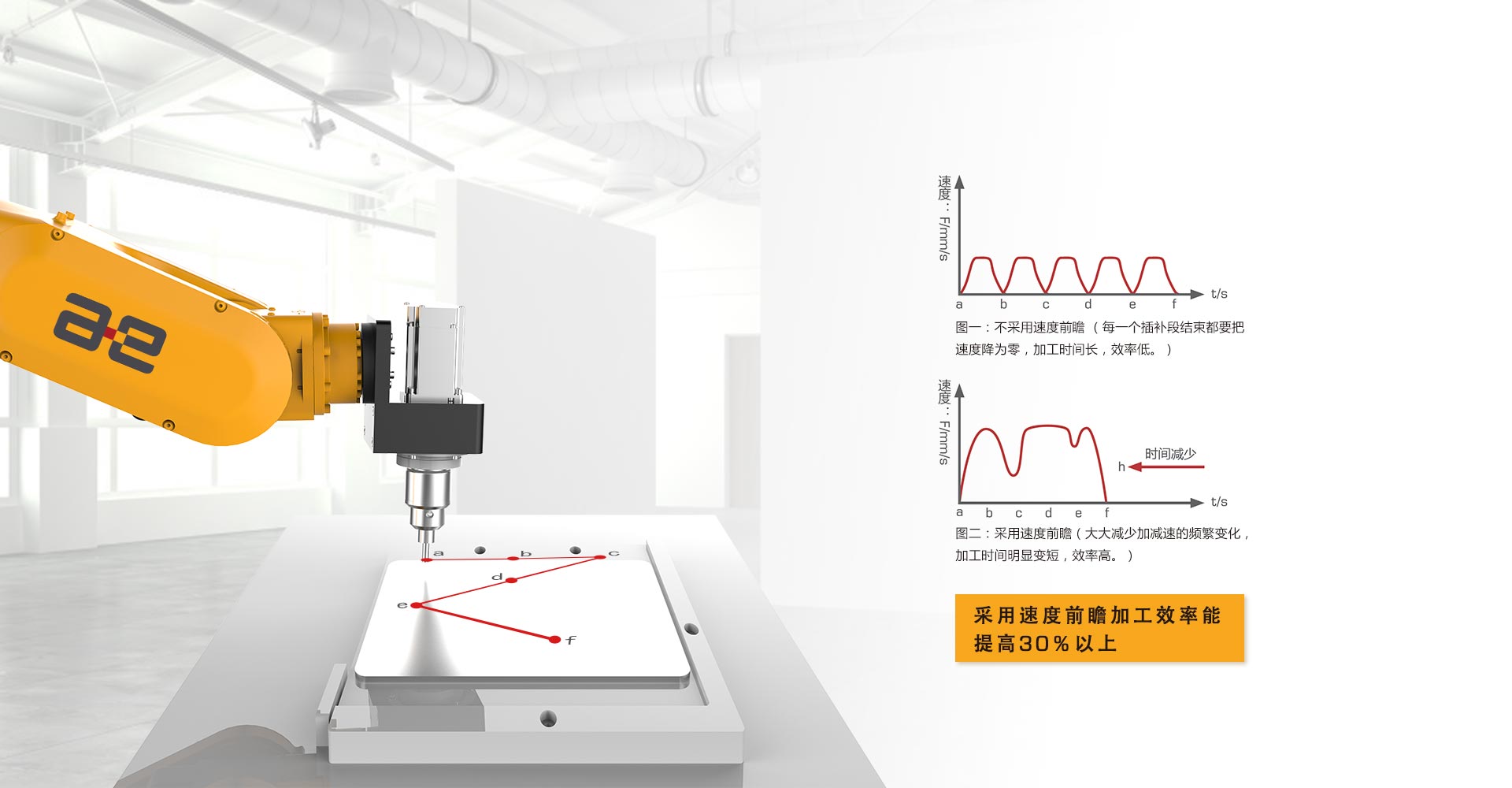
速度前瞻
提前发现轨迹拐点并进行速度规划,实现高速度下的平滑过渡
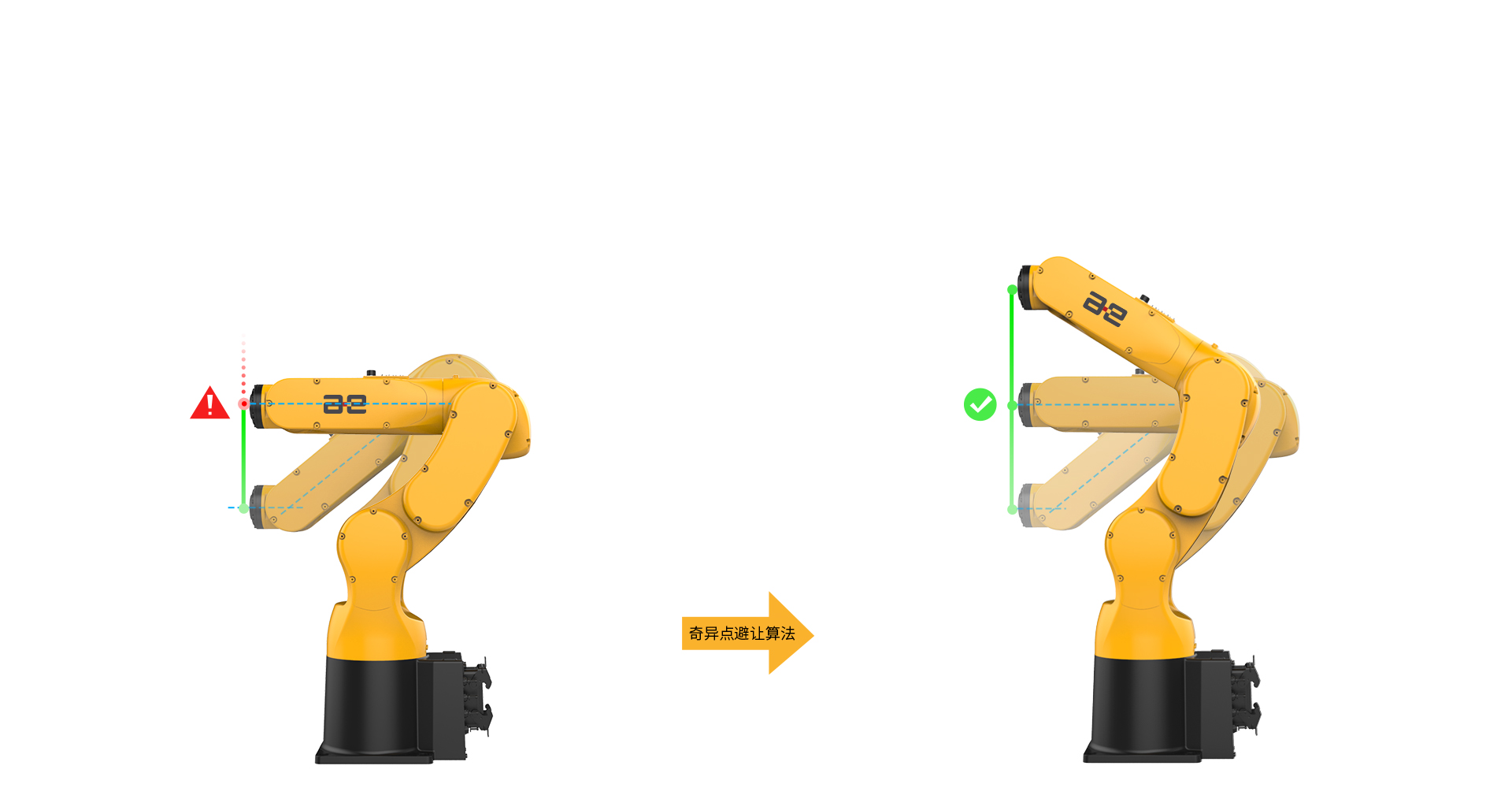
腕部奇异点避让算法
解决在腕部奇异点周围产生的关节速度过大问题

碰撞检测
采用电机的电流或者反馈的力矩来检测碰撞,保证人机安全

拖动示教
无需外部传感器,手动牵引机器人到达指定位姿或沿特定轨迹移动完成示教编程
节省培训和编程时间、提高生产效率的同时,降低了使用机器人的过渡成本

轨迹位移
通过轨迹平行位移、平行旋转等功能得到新的轨迹
减少示教的工作量
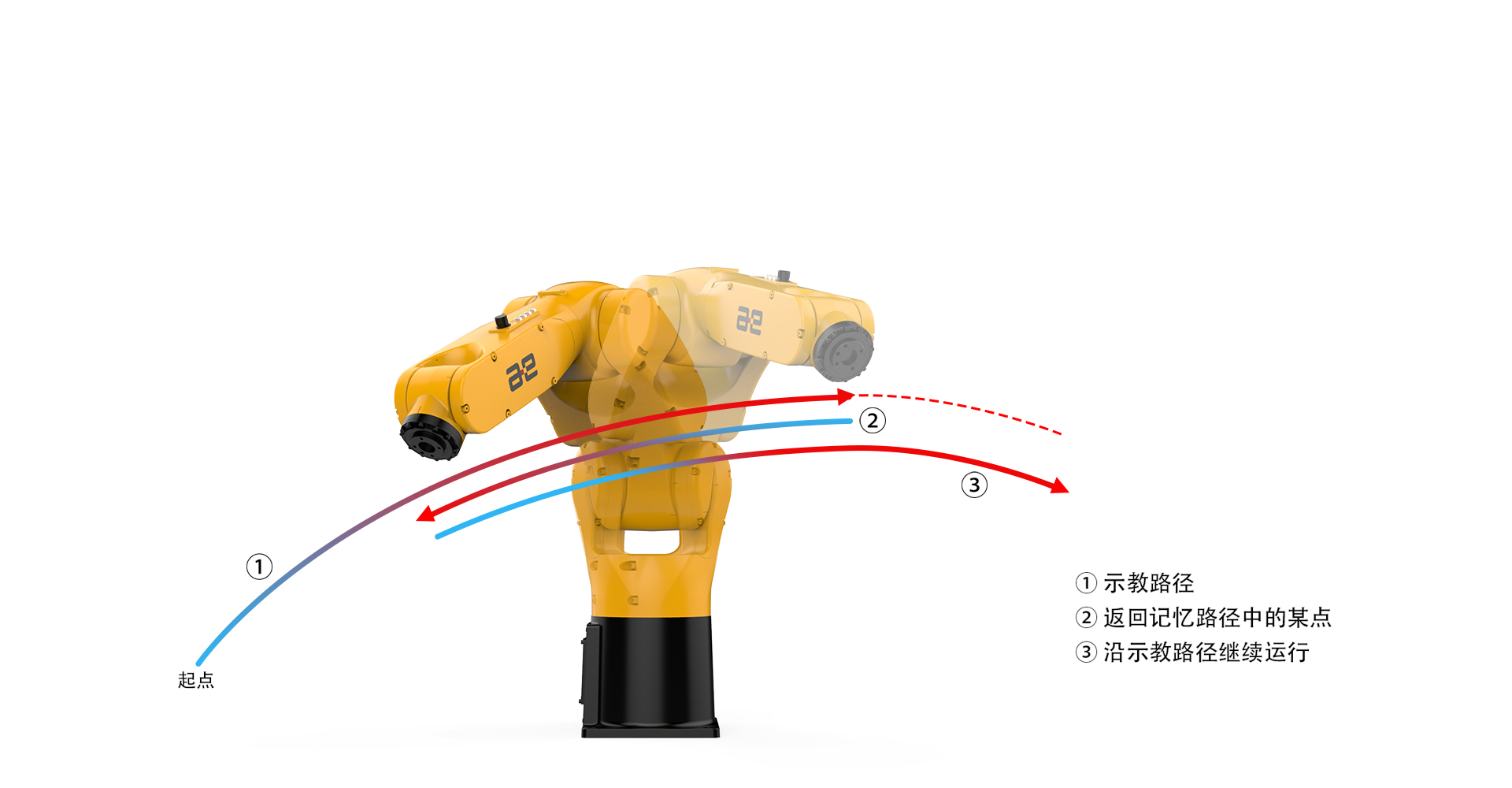
轨迹记忆
记录TCP走过的轨迹,解决机器人暂停再次启动时偏离原始示教路径运行的问题
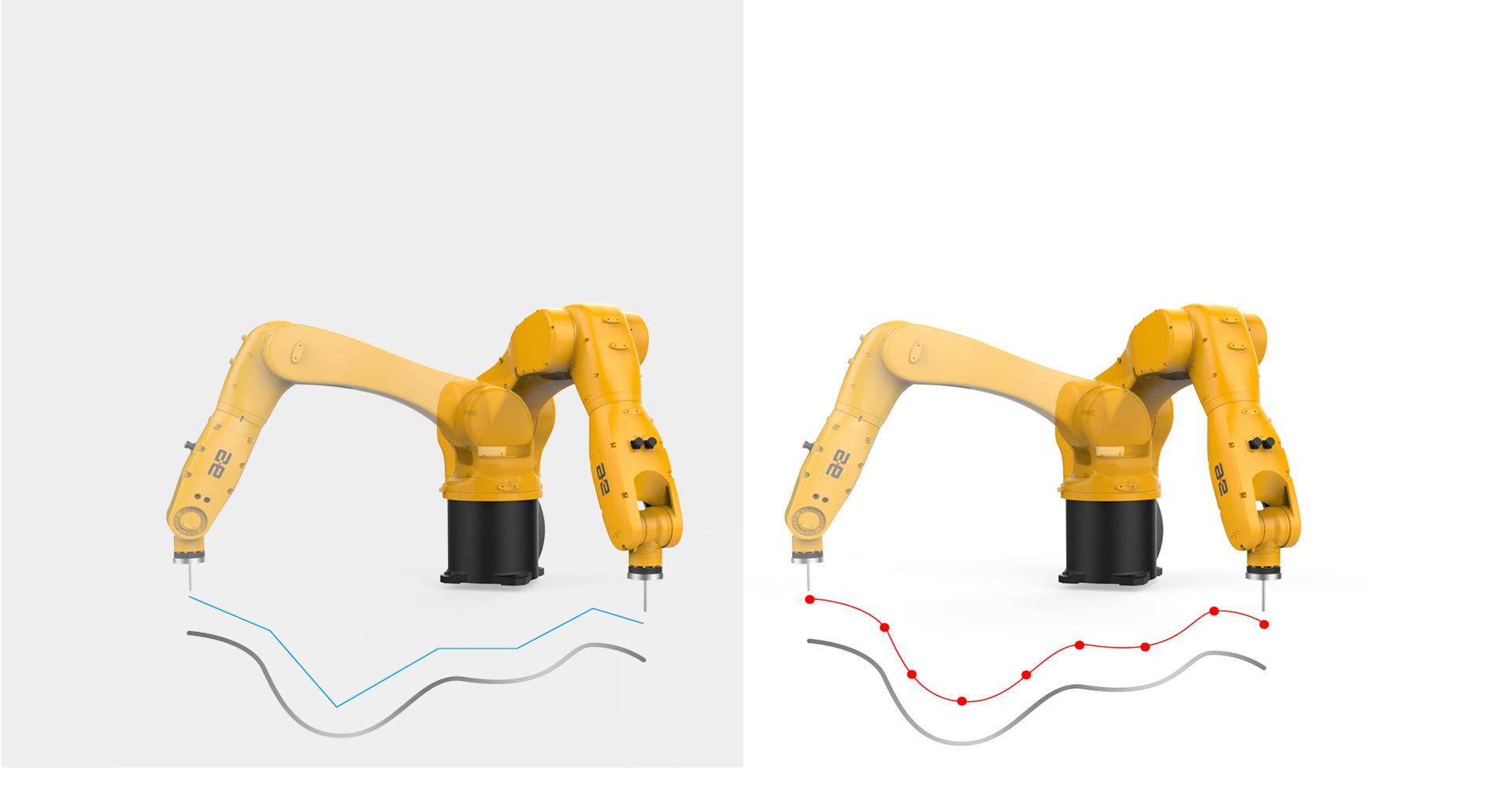
B样条轨迹
解决了使用直线和圆弧来拟合各种形状曲线存在的工作量大、拟合精度低的问题
