配天机器人安全区域控制技术
2017-09-28
随着制造业快速发展,越来越多的机器人被用于工业生产中。在很多生产流程中,一个工位需要两个甚至多个机器人相互配合进行工作,如何避免机器人发生碰撞自然就成了首要问题,这直接关系到企业的安全生产。
在生产过程中,为了避免多台机器人共同工作或者机器人与其他设备配合工作时发生干涉碰撞,用户可以对TCP的运动区域进行限制。
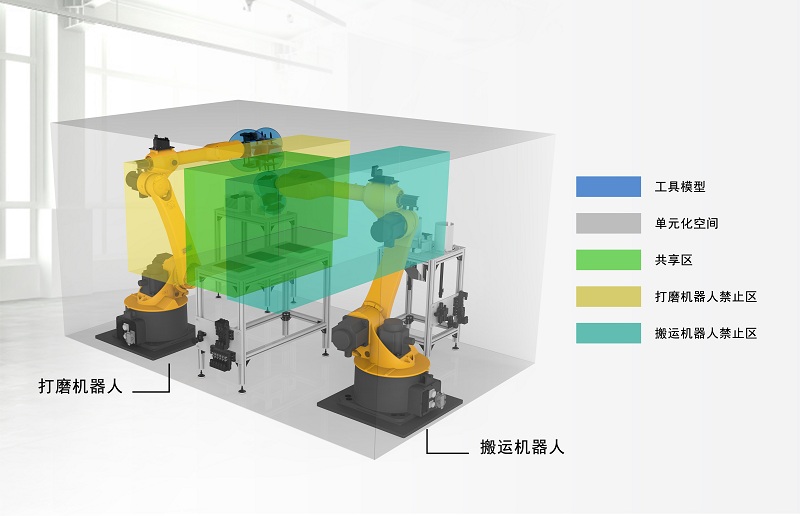
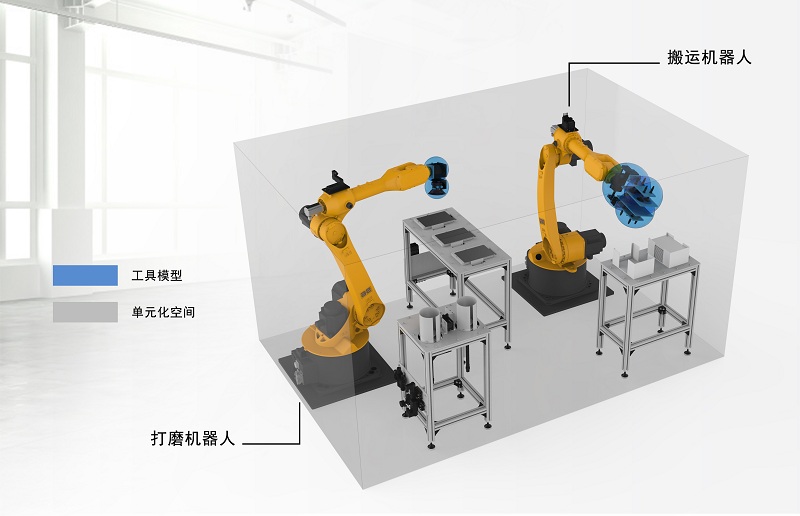
AE.SecurityControl软件可定义24个不同的监控区域和一个单元化空间,通过实时地监控机器人TCP位点和这些区域的位置关系来控制机器人的运行和停止。
根据实际情况,这些区域类型包括:
禁止区域
停止区
共享区域
信号共享区
单元化空间
通过AE.SecurityControl软件可以对监控区域的形状、类型、大小、位置等相关参数进行配置,可以满足两个机器人甚至多个机器人在同一工位进行安全操作的需求。